





Objectif : Mise en œuvre d’un CAN série
Piloter un CAN série intégré avec un protocole de communication SPI. Nous utiliserons le LTC1286 (CAN 12 bits à approximations successives intégré). Notion de métrologie : erreur de gain, erreur d'offset.
Etape 4 : Etalonnage du LTC1286
Le protocole SPI est une des liaisons série les plus
répandues (avec l'I²C et l'UART)
Nous l'avons déjà utilisé pour la mise en oeuvre d'une carte
SD à l'aide de la bibliothèque SPI.
|
 |
 1)
Câblage du CAN LTC1286 - Exploitation du datasheet
1)
Câblage du CAN LTC1286 - Exploitation du datasheet
- VCC = 5V
- L'entrée -IN est mise à la masse.
- La tension d'entrée sur +IN est appelée VIN.
- Mettre un condensateur C = 2.2 µF entre la masse et l'alimentation VCC ainsi qu'entre la masse et VREF.
- Les broches CLK
(SCK <=> D13)
, DOUT
(MISO : Master In Slave Out <=> D12) et CS (Chip
Select ou Slave Select
<=>D10)
sont reliées aux entrées/sorties digitales 13,12 et 10 du microcontrôleur Arduino.
Questions préliminaires
On appelle N2 le mot binaire de 12 bits renvoyé sur la
sortie DOUT
par le CAN LTC1286.
 1.2) Déterminer la relation donnant VIN en fonction
de N2, VREF et du nombre de bit du CAN
utilisé.
1.2) Déterminer la relation donnant VIN en fonction
de N2, VREF et du nombre de bit du CAN
utilisé.
Mesurer au voltmètre le "5V" de
l'Arduino. Remplacer VREF par cette valeur.
Attention sur la figure q et Vin ont été calculés avec un VREF < 5
V...
 1.4)
En utilisant le datasheet et en ne prenant en compte que l'erreur de
gain et d'offset :
1.4)
En utilisant le datasheet et en ne prenant en compte que l'erreur de
gain et d'offset :
-
calculer l'erreur type de gain en % de la pleine echelle ;
-
Évaluation de type
B de l'incertitude
mais elle est « estimée » à partir d’informations : certificat
d’étalonnage, classe des instruments, documentation
constructeur…
erreur en V = erreur en LSB * q
L'incertitude max (MAX) correspond à un intervalle de 4σ soit un niveau
de confiance de 99,994 % .
L'incertitude élargie (U) pour un niveau de confiance de 95 %
correspond à un intervalle de 2σ.
L'inceritude élargie se note U (de l’anglais «
Uncertainty »)
Le Guide pour l'expression de l'incertitude de mesure (GUM)
constitue le document de référence fondamental de la métrologie
Guide
to the expression of Uncertainty in Measurement


Voici un extrait de la documentation constructeur :

Soit une mesure de 005,0087 mVDC (6½
digits) sur
- une erreur de gain en % de la lecture : 0,003%*5,0087
= 0,00015 mV
- une erreur d'offset en % de la gamme : 0,003%*100 = 0,003
mV
Pour une erreur absolue de 0,00315 mV.
V = 5,0087
1.5) Quelle est erreur absolue pour une mesure
![]() faite
par le FI2960MT ?
faite
par le FI2960MT ?
V = 2,4717 ± ?
Que peut-on dire de cette erreur
devant celle du LTC1286 ?

 2)
RÉALISATION ET TEST DU PROGRAMME D'ACQUISITION
2)
RÉALISATION ET TEST DU PROGRAMME D'ACQUISITION
Nous n'utilisons pas la bibliothèque SPI car sa fréquence (4MHz) est trop élevée pour le LTC1286 (200 kHz max).
Voici le protocole à respecter d'après le datasheet :
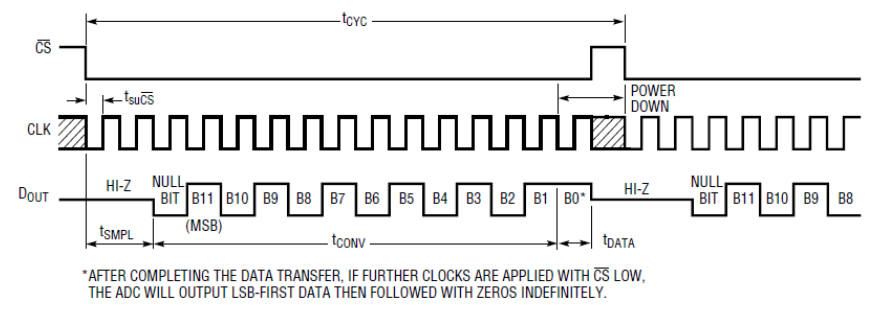
Pour lire le résultat de la conversion il faut :
- mettre CS à 0 ;
- envoyer 2 impulsions d'horloge ;
- puis pour les 12 impulsions d'horloge suivantes,
après chaque impulsion d'horloge le LTC1286 envoie successivement les bits B11 (MSB) à B0 (LSB);
chaque bit est lu grâce à la fonction digitalRead() : Dout=digitalRead(12);
N2 = B11*211+B10*210+...+B1*21+B0*20 - mettre CS à 1 (fin de la lecture de N2).
Cahier des charges :
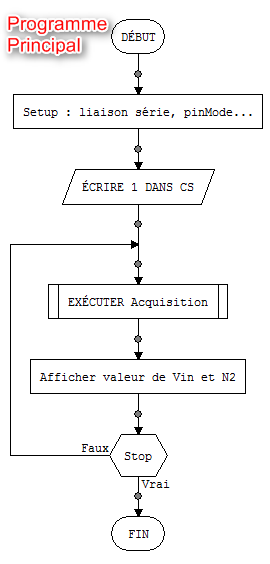
2.1) A l'aide des organigrammes ci-contre,
construire un programme permettant de communiquer avec le LTC1286.
La structure du programme comportera :
- un programme principal
- une fonction utilisateur Horloge()
- une fonction utilisateur Acquisition()

 2.1-a)
Réaliser le sous-programme Horloge et le tester.
2.1-a)
Réaliser le sous-programme Horloge et le tester.
Régler la
temporisation pour avoir une fréquence d’environ 10 kHz à 1 kHz près
(fmax = 200 kHz d’après le datasheet)
Le chronogramme ci-dessous montre que l'état haut de l'horloge dure
55 µs au lieu de 50 µs. Soit 5 µs de trop =>
delayMicroseconds(45);
Le chronogramme ci-dessous montre que l'état bas de l'horloge dure
60 µs au lieu de 50 µs. Soit 10 µs de trop =>
delayMicroseconds(40);
2.1-b) Réaliser le sous-programme Acquisition et le tester en lançant une acquisition.
2.1-c) Finir par le programme principal LTC1286,
lequel lance des acquisitions en boucle toutes les 500 ms
et affiche sur le
moniteur série : "12 2047 2.427"
soit k Tab-> N Tab-> Vin
k numéro de la mesure
tabulation (« \t ») N tabulation
(« \t ») Vin (avec 3 chiffres après la virgule et retour à la
ligne).
Dans le setup ajouter : Serial.println("Mesure \tN \tVin en V");
2.2) Pour une valeur VIN de 2,5 V
contrôlée au multimètre de table,
relever avec l'analyseur logique les
signaux CS, CLK et DOUT montrant le cycle complet de l'acquisition
d'un mot binaire N2.
Retrouver à partir de ces chronogrammes, la
valeur du mot binaire N2 reçu.
Mesurer le temps nécessaire à réaliser un
cycle acquisition.
Joindre au compte rendu une capture d'écran des
chronogrammes

Evaluation de type A de l'incertitude - Fidélité et justesse.
Evaluation de type A :
c’est le cas où l'opérateur réalise une série de mesures répétées
dans les conditions de répétabilité.
Elle se fonde sur l’application de méthodes statistiques à une série
de valeurs expérimentales répétées.
L’incertitude-type u (ou s) est alors déterminée à partir du calcul
de l’écart-type empirique corrigé sn-1
Condition de répétabilité
: condition de mesurage dans un ensemble de conditions qui
comprennent la même procédure de mesure,
les mêmes opérateurs, le même système de mesure, les mêmes conditions de
fonctionnement et le même lieu,
ainsi que des mesurages répétés sur le même objet ou des objets
similaires pendant une courte période de temps
Fidélité :
«Étroitesse de l'accord entre les indications ou les valeurs
mesurées obtenues par des mesurages répétés du même objet ou
d'objets similaires dans des conditions spécifiées » (VIM).
Le défaut de fidélité résulte des erreurs
aléatoires.
Le défaut de fidélité sera quantifié par
l’écart type de la série de meure.
u = Sn-1
Justesse de mesure :
«Étroitesse de
l'accord entre
la moyenne
d'un nombre
infini de
valeurs mesurées
répétées et
une valeur
de référence » (VIM).
biais de mesure (erreur de justesse) :
![]()
 Le voltmètre FI2960MT nous donne la mesure de
référence = yréférence
Le voltmètre FI2960MT nous donne la mesure de
référence = yréférence
Le biais de mesure est une erreur systématique qui peut être corrigée par un étalonnage par exemple.
l'histogramme de répartition de la série de mesures tend vers une courbe
de Gauss lorsque le nombre n de mesures tend vers l'infini.


 Incertitude élargie U : L’incertitude élargie U est donc
obtenue en multipliant l’incertitude-type composée par un facteur k
Incertitude élargie U : L’incertitude élargie U est donc
obtenue en multipliant l’incertitude-type composée par un facteur k
appelé facteur d’élargissement, qui permet d’obtenir un intervalle
correspondant à un niveau de confiance choisi.
Pour une loi de distribution normale (cas le plus
fréquent), le facteur d’élargissement k est assimilable au
coefficient de Student t.
t est disponible dans la table de Student : il varie selon le nombre
de mesures n et le niveau de confiance.

3) Evaluation de type A de l'incertitude du LTC1286 pour un étalon proche de 2,5 V
3.1)  - Réaliser une série de
300 mesures
dans les conditions de répétabilité.
- Réaliser une série de
300 mesures
dans les conditions de répétabilité.
- Arrêter le défilement automatique,
sélectionner les 300 premières mesures et les copier ;
coller les mesures dans un tableau Excel.
-
- Calculer dans Excel l’écart-type
et la moyenne de cette série de
mesure.
3.2) Tracer l'histogramme de la
distribution des mesures à l'aide d'Excel
Tuto Excel
: la fonction matricielle FREQUENCE(tableau_données,
matrice_intervalles)
Joindre l'histogramme à votre compte
rendu.
L'allure de cette distribution suit
plutôt quelle loi ?

3.3) Calculer le biais de mesure
(quantification de l’erreur de justesse)
Exprimer ce biais en V et en LSB.
Le LTC1286 est-il juste ? Comment
peut-on rendre le LTC 1286 plus juste ?
3.4) Calculer l’écart-type ufidelité
de cette série de mesure.
Exprimez ufidelité en volt
et en LSB.
En déduire l'incertitude élargie Ufidélité
pour un intervalle de confiance de 95%
Le LTC1286 est-il fidèle ? Comment
peut-on rendre le LTC 1286 plus fidèle ?

4) Etalonnage du LTC1286
4.1) Modifier le programme principal afin
d’afficher comme résultat la valeur moyenne de 10 acquisitions
successives.
Quelle erreur permet de réduire cette
méthode ?
4.2) Mesurer à l'aide d'un voltmètre de
référence la valeur « exacte » de VIN.
En déduire la tension d'erreur du CAN
(différence entre la valeur mesurée et la valeur réelle).
La tension de référence sera celle du voltmètre FI2960MT.
Pour chaque mesure calculer l'erreur
de mesure.
Remplir le tableau de mesure
suivant :
|
Référence en Volt |
0,5 |
1 |
2 |
3 |
4 |
4,5 |
4.9 |
|
N |
|
|
|
|
|
|
|
|
LTC1286 en Volt |
|
|
|
|
|
|
|
|
Erreur en mV |
|
|
|
|
|
|
|
|
Erreur en LSB |
|
|
|
|
|
|
|
 4.3) Tracer V(N). Établir son équation.
4.3) Tracer V(N). Établir son équation.
Comparer la pente de la droite et
le quantum.
Exprimer cette erreur de gain (pente
de la droite) en LSB. Comparer
celle-ci à l'erreur de gain annoncée par le constructeur.
Exprimer la tension d'offset en LSB.
Comparer celle-ci à l'erreur d'offset annoncée par le constructeur.
Votre LTC est il dans l'intervalle de
confiance de 68%, 95% ou 99,994% ?
4.4) Utiliser l'équation obtenue par l'étalonnage précédant
pour calculer Vin en fonction de N2.
Remplir à nouveau le tableau 2.5) Les
erreurs sont-elles réduites ?
Existe-t-il encore un biais de mesure
?
Tuto Excel
: la formule matricielle DROITEREG. Ecart type des résidus : u
= Sey = Sn-2
5) Il vous reste du temps ?
Ajouter au montage un écran LCD qui affiche q, N et la tension mesurée
6) Pour aller plus loin.
Il est possible d'utiliser la bibliothèque SPI pour communiquer avec le LTC1286.
Cela permet de communiquer plus vite.
Pour cela il faut :
-
diminuer la fréquence d'horloge (16/4 = 4 MHz par défaut) en dessous de 200 kHz grâce à la fonction :
SPI.setClockDivider(SPI_CLOCK_DIV128); // Horloge à 16000/128 = 125 kHz -
 lire
l'octet de poids fort et éliminer les 2 bits haute impédance
(HI-Z) et le bit nul
lire
l'octet de poids fort et éliminer les 2 bits haute impédance
(HI-Z) et le bit nul
les 3 bits de poids fort sont à éliminer
(en SPI_MODE0, les bits sont lus sur un front montant d'horloge)
pour cela nous allons faire un décalage à gauche de 3 bits et garder les 5 bits à droite
N1=SPI.transfer(0x00)<<3; -
seuls les 7 bits à gauche sont à garder (5+7 = 12 bits) le dernier bit lu est en haute impédance (HI-Z)
pour cela nous allons faire un décalage à droite de 1 bit et garder les 7 bits à gauche :
-
N1 correspond au 5 bits de poids fort B11 à B7
il faut déplacer le bit de N1 de rang 7 au rang 11 en le multipliant par 24
N2 correspond au 7 bits suivants B6 à B0
Combien de temps faut-il au LTC1286 pour transmettre N ?
Remplacer
SPI_CLOCK_DIV128 par
SPI_CLOCK_DIV64
Quelle est la nouvelle fréquence d'horloge ?
Le LTC1286 fonctionne-t-il encore correctement ?